 ЦНЬЈШШЯп
ЦНЬЈШШЯп



YuMiаТФъПьРжжЎаЭЌБрГЬ
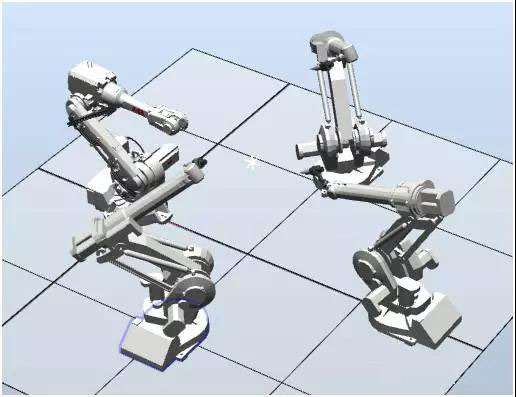
**ЃКЭЯШыYuMiЃЌЕМШызЅЪжВЂАВзАЕНЛњЦїШЫЃЌВЂДДНЈЯЕЭГ

ЕкЖўЃКДДНЈвЛИіОиаЮЬхЃЌОйР§400*200*10ЃЌВЂгвЛїаоИФ-ЭМаЮЯдЪОЃЌЛљБОЮФРэЕМШыЭМЦЌ
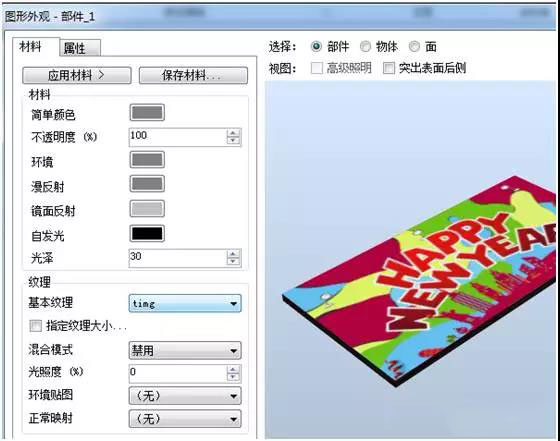
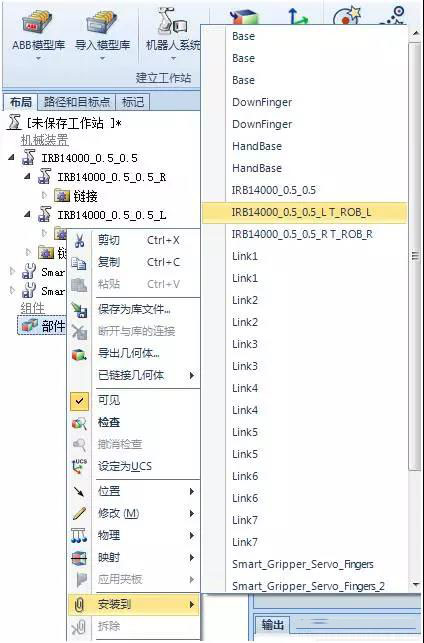
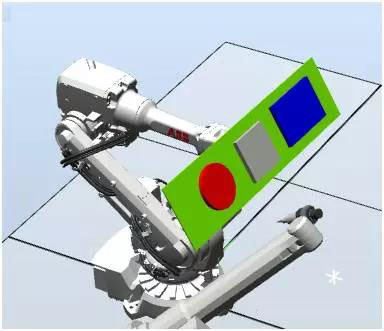
ЕкШ§ЃКЕїећОиаЮЬхЮЛжУВЂАВзАЕНЛњЦїШЫзѓЪжЩЯЃЌГіЯжЪЧЗёаоИФЮЛжУЃЌбЁдёЁАЗёЁБ
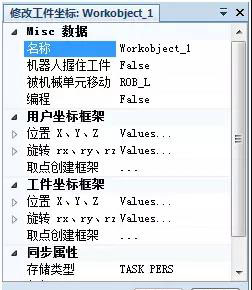
ЕкЫФЃКМЄЛюгвЪжЛњЦїШЫЃЌВЂДДНЈзјБъЯЕЃЌзјБъЯЕгЩзѓЪжЧ§ЖЏ
ЕкЮхЃКМЧТМЕБЧАгвЪжЛњЦїШЫдкзѓЪжзјБъЯЕЯТЕФЕуЃЌВЂДДНЈгяОфmoveL

ЕкСљЃКМЄЛюзѓЪжЃЌМЧТМЖрИідЫЖЏгяОфВЂДДНЈ

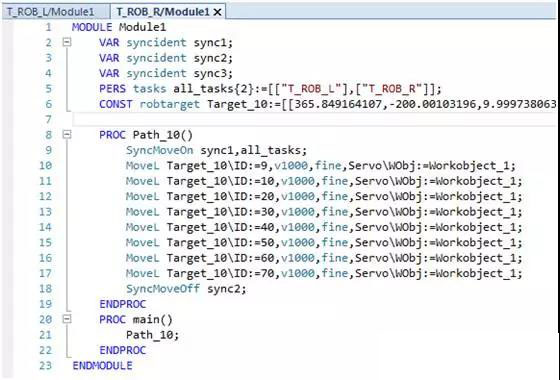
ЕкЦпЃКАбТЗОЖЭЌВНЕНЛњЦїШЫrapid
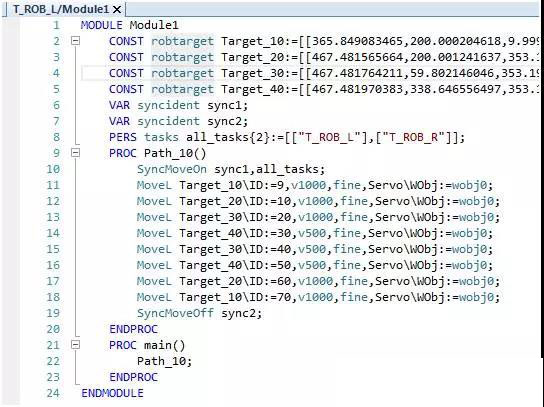
ЕкАЫЃКДЫДІашвЊЪЙгУЛњЦїШЫЭЌВНЁЃYuMiдкДДНЈЯЕЭГЪБздЖЏМгШыСЫ604-1ЭЌВНаЕїбЁЯю
ЕкОХЃКзѓЪжЛњЦїШЫДњТыШчЯТ
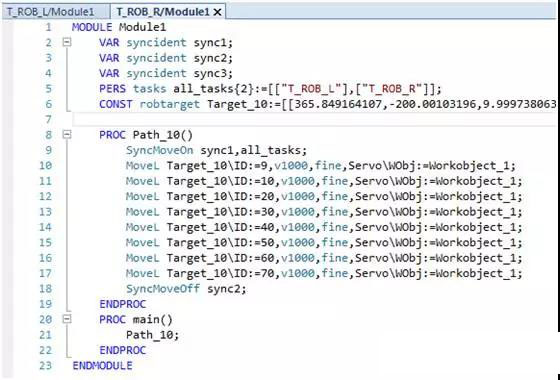
ЕкЪЎЃКгвЪжЛњЦїШЫДњТыШчЯТ
4ЬЈЛњЦїШЫаЭЌдЫЖЏ
**ЃКЕМШы4ЬЈ1410ЛњЦїШЫВЂЕїећВМОж
ЕкЖўЃКЕМШыШ§ИіЙЄОпВЂАВзАЕН3ЬЈЛњЦїШЫЩЯ
ЕкШ§ЃКжЦзїВњЦЗЙЄМўЃЌВЂАВзАЕНЛњЦїШЫ1ЩЯ
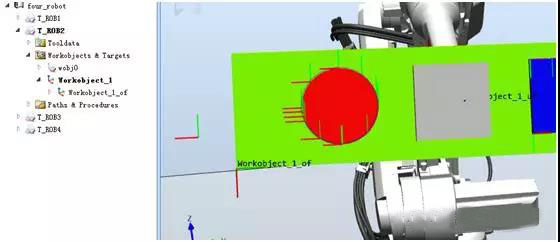
ЕкЫФЃКДгВМОжДДНЈЯЕЭГЃЌЦфжа**ЬЈЛњЦїШЫГжгаЙЄМў
ЕкЮхЃКМЄЛюT_ROB2ЃЌМДдкЕкЖўЬЈЛњЦїШЫЯТЃЌдк1КХЛњЦїШЫГжгаЕФЙЄМўЯТзіЙЄМўзјБъЯЕЃЌЦфжаЃЌзјБъЯЕгЩROB_1Ч§ЖЏ
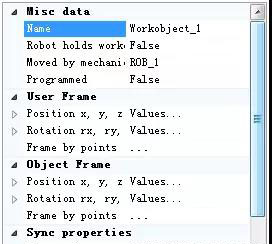
ЕкСљЃК2КХЛњЦїШЫдкетИізјБъЯЕЭъГЩЙьМЃЁЃ
ЕкЦпЃКЭЌРэЭъГЩ3КХКЭ4КХЛњЦїШЫЙьМЃ
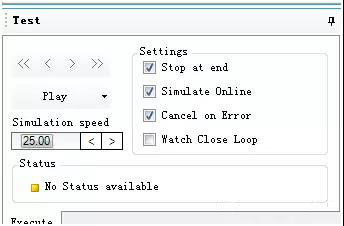
ЕкАЫЃКЕуЛїmultimoveАДХЅ

ЕкОХЃКЩшЖЈЭъЦ№ЪМЮЛжУКѓЃЌЕуЛїPlayЃЌЯЕЭГздЖЏМЦЫу4ЬЈЛњЦїШЫЙьМЃ
БОЮФеЊздЭјТч
ЯыСЫНтИќЖрЧыЕуЛїЃКABBЛњЦїШЫ