 ئ½ج¨ببدك
ئ½ج¨ببدك



1،¢ث«»ْئ÷بثسë±نخ»»ْ±à³ج
**£؛بçدآح¼£¬ث«»ْئ÷بث+±نخ»»ْدµح³£¬ت¹سأMultimove£¬£¨¼´ز»ج¨؟طضئئ÷£¬ز»¸ِت¾½جئ÷£¬ب¸ِشث¶¯بخخٌ£©
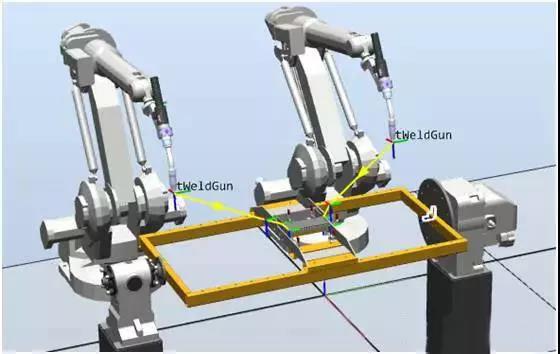
µع¶£؛»ْئ÷بثذèزھسذmultimoveر،دî 604-1»ٍصك604-2
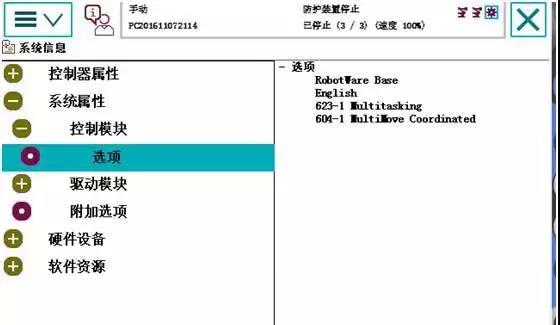
604-1ؤـ¹»تµدض¶à»ْئ÷بثشعز»¸ِ×ّ±êدµذح¬شث¶¯£¬604-2ض»ؤـ°ëءھ¶¯£¬¼´»ْئ÷بثح¬ت±؟ھت¼£¬¹³جضذ¸÷×ك¸÷µؤ،£
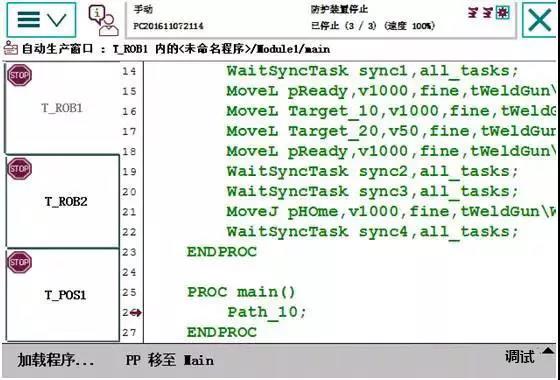
µعب£؛¶àبخخٌةْ²ْ´°؟عبçدآح¼
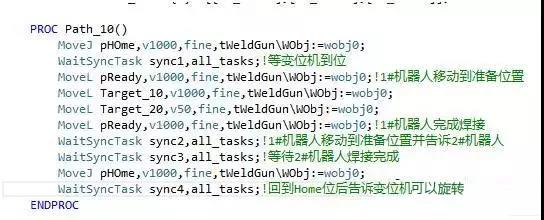
B£©ء½ج¨»ْئ÷بث×كµ½×¼±¸؛¸½سخ»ضأ
C£©1#»ْئ÷بث؟ھت¼؛¸½س**¶خ£¬حê³ة؛َ×كµ½ready_1خ»ضأ
D£©1#؛¸½سحê³ة؛َ£¬2#»ْئ÷بث؛¸½س£¬حê³ة؛َ×كµ½ready_2خ»ضأ
E£© ء½ج¨»ْئ÷بثز»ئً»ط¸÷×شHome
F£© ±نخ»»ْ×ھµ½ةدءدخ»ضأ
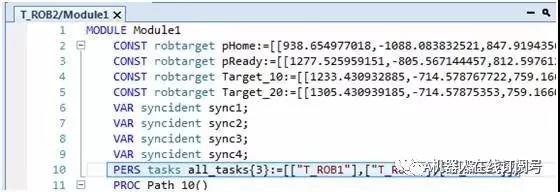
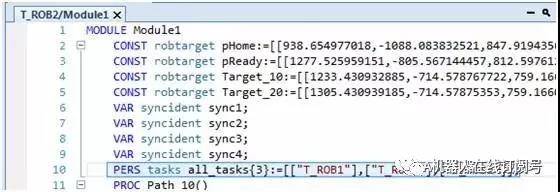
±نخ»»ْبخخٌ
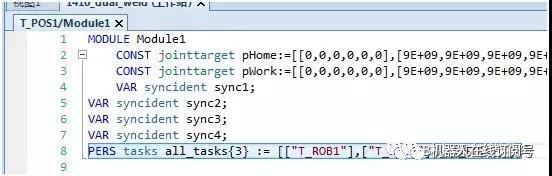
×¢زâت¾ف±طذëتاPERS£¬ت×éؤعبفخھب¸ِبخخٌµؤأû³ئ
1#»ْئ÷بثبخخٌ
2#»ْئ÷بثبخخٌ
µعءù£؛¶à»ْئ÷بث¼نزھد໥µب´£¬ذèزھجي¼ست¾فSync£¬بçدآ
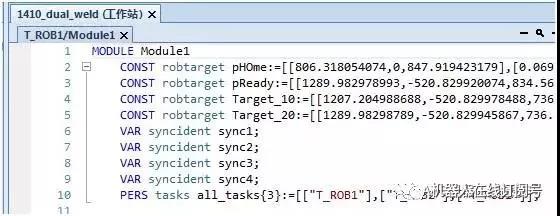
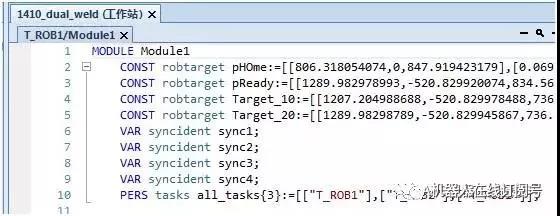
±نخ»»ْبخخٌہïµؤ4¸ِsyncidentت¾فsyn1£¬syn2,syn3,syn4
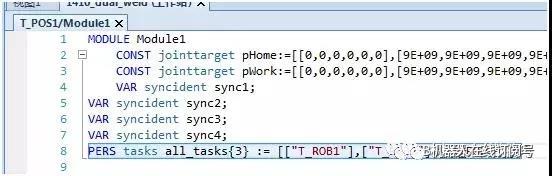
1#»ْئ÷بثبخخٌµؤ4¸ِsyncidentت¾فsyn1£¬syn2,syn3,syn4
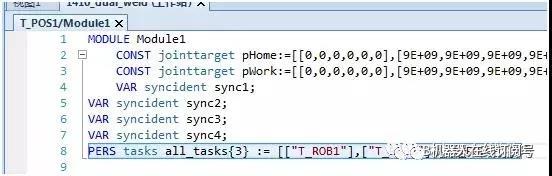
2#»ْئ÷بثبخخٌµؤ4¸ِsyncidentت¾فsyn1£¬syn2,syn3,syn4
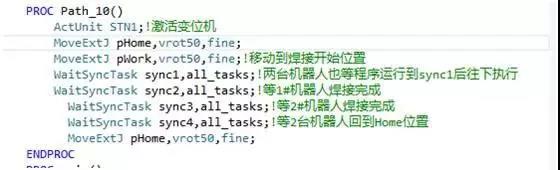
دآح¼خھ±نخ»»ْ³جذٍ
دآح¼خھ1#»ْئ÷بث³جذٍ
زشدآخھ2#»ْئ÷بث³جذٍ
2،¢ABB»ْئ÷بث´´½¨آë¶â³جذٍ
ت²أ´تاآë¶â£؟
سذ¹وآةµؤزئ¶¯»ْئ÷بث½ّذذ×¥ب،¼°·إضأ،£
بç؛خ¼ٍ±مآë¶â³جذٍ
ةèضأ؛أ¹¤¼×ّ±êدµ£¬¹¤¾ك£¬¶ش**¸ِآë¶â·إضأµم½ّذذت¾½ج£¬xyz·½دٍµؤ¼ن¾à؛ح¸ِت؟ةةè،£
بç؛خ´´½¨
**£؛´´½¨m_palletؤ£؟é
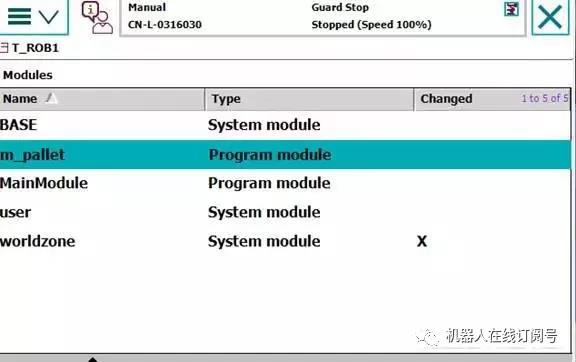
µع¶£؛½¨ء¢ء½¸ِroutine
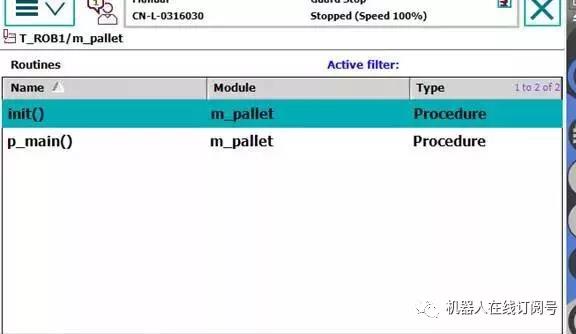
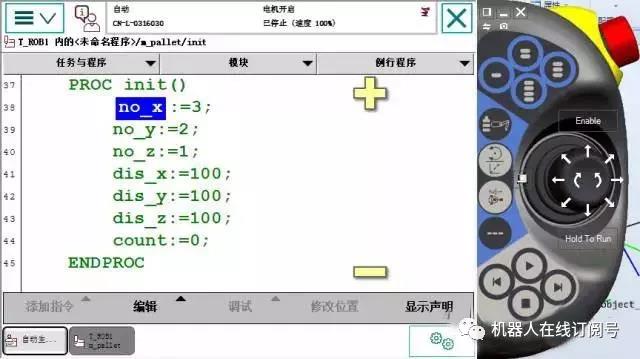
µعب£؛شعinit ³جذٍہةèضأxyz·½دٍ¸ِت؛ح¸÷·½دٍ¼ن¾à
µعثؤ£؛شعp_main³جذٍہ´´½¨»ْئ÷بثزئ¶¯µ½pHomeµم£¬pPickخ»ضأ£¨×¥ب،خ»ضأ£©£¬زش¼°**¸ِ·إضأµمpPlace_ini£¬ح¨¹ب²مforر»·£¬½ّذذآë¶â،£تµہ³جذٍخھدبx·½دٍ£¬شظy·½دٍ£¬شظz·½دٍ
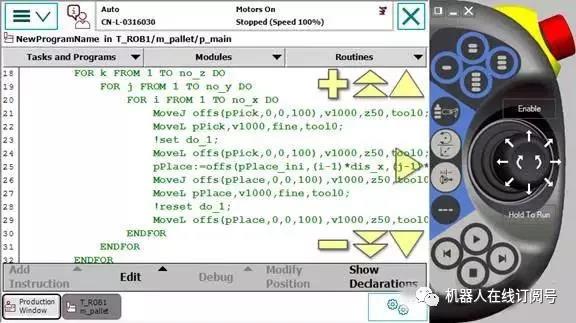
ئنضذئ«زئبçدآ£؛
pPlace:=offs(pPlace_ini,(i-1)*dis_x,(j-1)*dis_y,(k-1)*dis_z)،£
±¾خؤصھ×شحّآç
دëءث½â¸ü¶àاëµم»÷£؛ABB»ْئ÷بث