 平台热线
平台热线



日常生活中我们都知道遇到问题找源头,那么当遇到机器人出现安全保护模式我们该怎么处理呢?下面我们一起来了解一下它的原理方便经验丰富的技术们对症下药~
机器人紧急停止安全保护
情况一:

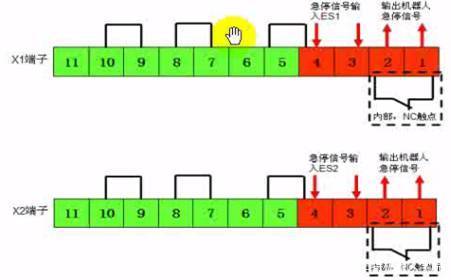
控制原理:当3—4之间断开后,机器人进入急停状态,1—2的NC触点断开。
连接说明:
1、将X1和X2端子第3脚的短接片剪掉。
2、ES1和ES2 分别单独接入NC无源接电。
3、如果要输入急停信号,就必须同时使用ES1和ES2。
情况二:

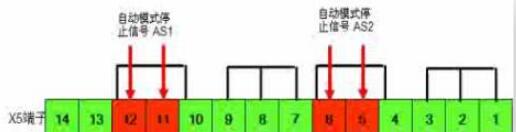
控制原理:当5—6、11—12之间断开后,在自动状态下的机器人进入自动模式安全保护停止状态。
连接说明:
1、将第5、11脚的短接片剪掉。
2、ASl和AS2分别单独接入NC无源接点。
3、如果要接入自动模式安全保护停止信号,就必须同时使用AS1和AS2
如需了解更多请点击:ABB机器人
本文摘自:网络